
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(7 шт. продукции доступно)





















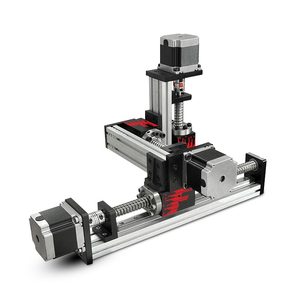








Роботизированная рука xyz и ось r — это неотъемлемый компонент в сфере промышленной обработки материалов, обеспечивающий точность и эффективность подъема, перемещения и позиционирования различных объектов. Созданные для облегчения движения тяжелых грузов, эти сложные устройства предназначены для оптимизации операций в различных секторах, включая производство, логистику и строительство. Благодаря использованию передовых технологий роботизированная рука xyz и ось r обеспечивают безопасность и производительность, превращая сложные задачи в выполнимые операции. Их универсальность позволяет адаптироваться к конкретным требованиям, делая их незаменимыми в современных промышленных приложениях.
Существует широкий спектр роботизированная рука xyz и ось r, каждый из которых предназначен для решения конкретных оперативных задач. Наиболее распространенными типами являются пневматические манипуляторы, гидравлические манипуляторы и электрические манипуляторы. Пневматические манипуляторы используют сжатый воздух для манипулирования грузами, обеспечивая плавный и точный контроль, идеально подходят для применений, требующих деликатного обращения. Гидравлические манипуляторы полагаются на жидкостное давление, обеспечивая прочные и мощные подъемные возможности, подходящие для задач повышенной нагрузки. Электрические манипуляторы используют электродвигатели для обеспечения движения, обеспечивая энергоэффективные операции с минимальным воздействием на окружающую среду. Каждый тип роботизированная рука xyz и ось r спроектирован с особыми особенностями, чтобы оптимизировать производительность для предполагаемого использования.
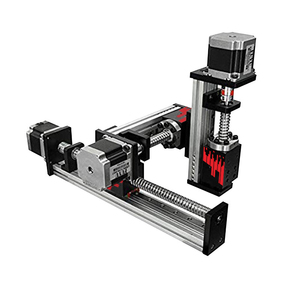
роботизированная рука xyz и ось r оснащены множеством функций и особенностей, которые повышают их полезность в промышленных условиях. Они предназначены для подъема, перемещения и позиционирования объектов с точностью, снижая ручной труд и увеличивая эффективность. К ключевым функциям относятся эргономичные рукоятки, регулируемые захваты и интуитивно понятные системы управления, которые облегчают легкость эксплуатации. Эргономичные рукоятки снижают усталость оператора, а регулируемые захваты позволяют адаптироваться к разным размерам и формам объектов. Интуитивно понятные системы управления позволяют беспрепятственно управлять нагрузками с точностью и уверенностью. Интеграция механизмов безопасности дополнительно гарантирует, что роботизированная рука xyz и ось r могут быть использованы с минимальным риском, защищая как операторов, так и задействованные материалы.
При конструкции роботизированная рука xyz и ось r используют высококачественные материалы и компоненты для обеспечения долговечности и производительности. Распространенные материалы включают сталь, алюминий и композитные сплавы, выбранные из-за своей прочности и износостойкости. Сталь обеспечивает исключительную прочность, делая ее идеальной для тяжелых применений. Алюминий предлагает легкую альтернативу, обеспечивая легкую маневренность без компромисса в прочности. Композитные сплавы обеспечивают баланс между весом и долговечностью, подходящие для специализированных применений. Кроме того, компоненты, такие как датчики, приводы и блоки управления, интегрированы для повышения функциональности, позволяя роботизированная рука xyz и ось r выполнять сложные операции с точностью.
Чтобы максимизировать пользу от роботизированная рука xyz и ось r, важно понимать их оперативные руководства и требования к техническому обслуживанию. Правильное использование предполагает выбор соответствующего типа, основанного на характере задачи и весе задействованных объектов. Операторы должны быть обучены эффективно обрабатывать системы управления, обеспечивая плавные и точные движения. Регулярное техническое обслуживание существенно для сохранения функциональности и долговечности роботизированная рука xyz и ось r. Это включает рутинные проверки, смазку движущихся частей и своевременную замену изношенных компонентов. Соблюдение руководств производителя обеспечит оптимальную производительность и безопасность, снижая время простоя и повышая производительность в различных промышленных условиях.
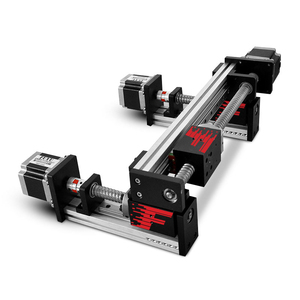
Выбор соответствующего роботизированная рука xyz и ось r для ваших промышленных нужд предполагает тщательное понимание ваших конкретных требований и оперативных условий. Одним из первоочередных考虑事項 является тип нагрузки, с которой вам нужно работать, так как различные манипуляторы предназначены для работы с различными весами и размерами. Например, пневматические манипуляторы подходят для более легких нагрузок и приложений, требующих деликатного обращения, а гидравлические манипуляторы идеальны для тяжелых задач. Кроме того, планировка рабочей зоны и доступные источники энергии являются важными факторами при определении того, какой роботизированная рука xyz и ось r будет более эффективным — электрический или ручной.
Другим существенным фактором, который следует учесть, является универсальность и адаптивность роботизированная рука xyz и ось r. Многие промышленные условия требуют оборудования, способного выполнять несколько задач или адаптироваться к меняющимся требованиям. Ищите манипуляторы с регулируемыми захватами и настраиваемыми системами управления, которые можно адаптировать под ваши специфические нужды. Интеграция передовых функций, таких как программируемые логические контроллеры (ПЛК) или датчики, может улучшить функциональность манипулятора, обеспечивая более точные операции и снижая человеческую ошибку. Понимание технических характеристик и возможностей роботизированная рука xyz и ось r поможет принять хорошо информированное решение.
Манипуляторы предлагают ряд преимуществ в промышленных условиях, включая повышенную эффективность и снижение затрат на рабочую силу. Используя роботизированная рука xyz и ось r, операторы могут работать с тяжелыми грузами с точностью, минимизируя риск травм и обеспечивая постоянную производительность. Кроме того, манипуляторы могут улучшить качество операций, обеспечивая точное позиционирование и движение, что существенно в производственных процессах, где точность имеет решающее значение.
Безопасность — значительный вопрос в любом промышленном окружении, и роботизированная рука xyz и ось r играют ключевую роль в усилении безопасности на рабочем месте. Перемещая тяжелые грузы и выполняя сложные задачи, манипуляторы снижают физическую нагрузку на рабочих, минимизируя вероятность травм на рабочем месте. Они оснащены механизмами безопасности, такими как функции аварийной остановки и защита от перегрузки, обеспечивая безопасную работу даже в сложных условиях.
Регулярное техническое обслуживание существенно для обеспечения долгосрочной производительности роботизированная рука xyz и ось r. Это включает рутинные осмотры для проверки износа и разрыва, смазку движущихся частей и калибровку систем управления. Важно следовать рекомендациям по обслуживанию от производителя, чтобы предотвратить неожиданные простои и поддерживать эффективность и безопасность манипулятора.
Да, роботизированная рука xyz и ось r могут быть сильно настроены, чтобы соответствовать конкретным промышленным применениям. Производители предлагают ряд опций, включая регулируемые захваты, программируемые системы управления и специализированные функции, адаптированные под конкретные задачи. Настройка позволяет предприятиям оптимизировать свои операции, повышая эффективность и производительность манипулятора.
Интеграция роботизированная рука xyz и ось r в существующие системы требует тщательного планирования и учета нескольких факторов. Важно оценить совместимость манипулятора с текущим оборудованием и процессами рабочего потока. Кроме того, обучение операторов новым системам и обеспечение бесперебойной коммуникации между манипулятором и другим оборудованием существенно для успешной интеграции. Правильная интеграция может улучшить общую эффективность и производительность промышленных операций.













